gekoppelte Oszillatoren
Gekoppelte Massensysteme weisen verschiedene Eigenmoden auf. In einer Eigenmode eines Systems schwingen alle Komponenten mit der gleichen Frequenz. Betrachte zwei federgekoppelte Massen, deren Bewegung in $x$-Richtung beschränkt ist.
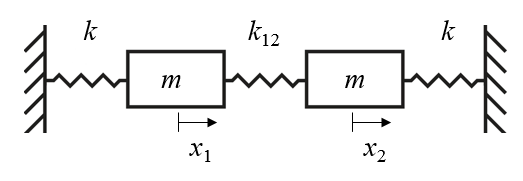
Dieses System beinhaltet zwei Eigenmoden. In der ersten bewegen sich beide Teilchen gemeinsam nach links und nach rechts, damit die Feder $k_{12}$ nie gestaucht ist. In der zweiten ist die Bewegung der Massen gegenphasig - zuerst bewegen sie sich zu-, dann gegeneinander. Diese zwei Eigenmoden werden unten im Video dargestellt.
Jede Bewegung dieses Systems kann als Superposition dieser zwei Eigenmoden dargestellt werden. Die folgenden Differentialgleichungen beschreiben das System:
$$m\frac{d^2x_1}{dt^2}=-kx_1 -k_{12}(x_1-x_2)\\m\frac{d^2x_2}{dt^2}=-kx_2 -k_{12}(x_2-x_1).$$Diese Gleichungen sind in den Differentialgleichungsrechner eingefügt worden, mit den Parametern: $m=1$, $k=1$, $k_{12}=0.1$. Die Knöpfe können verwendet werden, um die Anfangsbedingungen festzusetzen, welche die Gleichphasenmode $(v_1 = 1,\,v_2=1)$ und die Gegenphasenmode $(v_1 = 1,\,v_2=-1)$ anregen. Die Gegenphasenmode hat eine leicht höhere Frequenz als die Gleichphasenmode. Es gibt auch einen Knopf, um das System in einer Superposition dieser zwei Moden zu starten. Aufgrund deren fast identischen Frequenzen interferieren sie sich eine Zeit lang konstruktiv und darauffolgend eine Zeit lang destruktiv. Dieses Phänomen wird als Schwebung (englisch: "beats") bezeichnet.
Die Trajektorie der Masse kann berechnet werden, indem die entsprechende Differentialgleichung numerisch integriert wird.
|
|