Ein Block rutscht eine schiefe Ebene hinunter
Ein Block der Masse $m$ wird auf eine schiefe Ebene gestellt, die einen Winkel von $\theta$ Grad zur Horizontalen bildet.
| $y$ | |
$x$ |
Die Gravitationskraft $-mg\hat{y}$ lässt sich in eine Kraft senkrecht zur schiefen Ebene und eine Kraft parallel zur schiefen Ebene zerlegen.
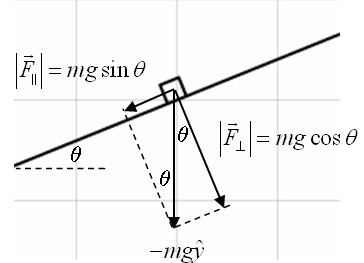
Die Kraft parallel zur Ebene, $|F_{\parallel}|=mg\sin\theta$, lässt den Block entlang der Ebene gleiten. In Bezug auf ihre $x$- und $y$-Komponenten ist die Kraft entlang der Ebene,
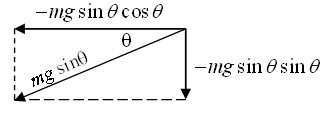
$\vec{F}_{\parallel} = -mg\sin\theta\cos\theta \hat{x} - mg\sin\theta\sin\theta \hat{y}.$
Dies ist eine konstante Kraft; sie ist unabhängig von der Position, der Geschwindigkeit und der Zeit. Wir erwarten eine parabelförmige Bewegung der Masse und Formeln f&uulm;r den Ortsvektor und den Geschwindigkeitsvektor finden Sie auf der Seite Konstante Kraft = Parabelbewegung. Es ist natürlich auch möglich, diese Kraft und die Anfangsbedingungen in einen numerischen Differentialgleichungslöser zu stellen. Die Kraft und die Masse werden bei jeder Einstellung der Schieberegler in den Differentiallöser unten geladen. Dem Differentialgleichungslöser kann eine Widerstandskraft hinzugefügt werden, indem der Kraft ein Term hinzugefügt wird, der der Geschwindigkeit entgegengesetzt ist. Wenn diese Widerstandskraft linear $\vec{F}_{drag} = -a\vec{v}$ ist, dann ist es möglich Formeln zur Beschreibung der resultierenden Bewegung zu finden. Wenn die Widerstandskraft jedoch nichtlinear ist, wie z. B. $\vec{F}_{drag} = -a|\vec{v}|\vec{v}$, können keine einfachen Formeln und kein numerischer Differentialgleichungslöser gefunden werden ist die beste Option.
keine Widerstandskraft: $\vec{F} = -mg\sin\theta\cos\theta \,\hat{x} - mg\sin\theta\sin\theta \,\hat{y}$
lineare Widerstandskraft: $\vec{F} = -mg\sin\theta\cos\theta\, \hat{x} - mg\sin\theta\sin\theta \,\hat{y}-a\vec{v}$
nichtlineare Widerstandskraft: $\vec{F} = -mg\sin\theta\cos\theta \,\hat{x} - mg\sin\theta\sin\theta \,\hat{y}-a|\vec{v}|\vec{v}$
|
= , = |
the animation to zoom or rotate. |