Semiconductor Laboratory
|
|
Semiconductor Laboratory | |
|
|
FH 54 Magnetometer
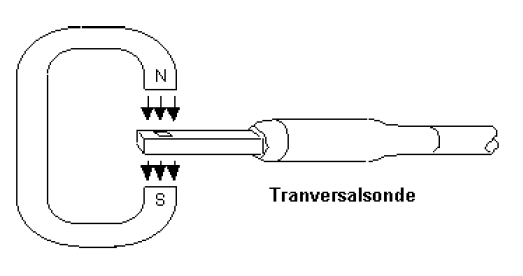
The FH 54 Magnetometer is a handheld measuring instrument for measuring the magnetic field strength H in Ampere per Meter (A/m) and the magnetic field (magnetic flux density) B in Tesla (T) or Gauss (G). It uses an analog output and a computer interface that allows data transfer and remote operation. The probe of the FH 54 is a Hall sensor that utilizes the Hall effect to measure the magnetic field. The range in which the FH 54 magnetometer can measure the magnetic field depends on the probe that is mounted. In the Magnet Laboratory, a Magnet-Physik HS-TGB5-104020 probe is used, that has a range from 3 mT to 3 T. In this transversal probe, the Hall sensor is attached at the tip and along the broad side of the probe head. So to get an accurate reading of the magnetic field, you have to orient this broad side perpendicular to the direction of the magnetic field as shown in the figure below. An angle of 10° in any direction can produce an error of 1.5%. See the manual FH 54 Anleitung.pdf for more information on how a tilt effects the measurement. The probe has to be handled with uttermost care! The sensor of the probe is very brittle, be careful not to damage it.
Manual operationAttach the Magnet-Physik HS-TGB5-104020 probe to the FH 54 (DA-15 connector), turn it on and let it warm up for 5 minutes. Although the FH 54 can be used battery powered, it is advised to use the power supply if you use it stationary. You can use the instrument to do AC (alternating, RMS or peak measurement) and DC (static) magnetic field measurements, if you measure the Bruker Magnet B-E 15 driven with the Heinzinger DC power supply you need to use the DC mode. A simple measurement can be performed by setting an appropriate range and the unit (Tesla) and carefully using the probe to measure the magnetic field of a permanent magnet (e.g. the ferromagnetic core of the Bruker Magnet B-E 15). The measurement is shown live at the display. Depending on the distance of the probe and its orientation relative to the permanent magnet, the measured value will change. To find the right orientation, the Max./Min. function can be used, press the button until the minimum and the maximum value are displayed. You can then change the orientation of the probe and use the orientation with the maximum magnetic field for further measurements. The Max./Min. values can be reset with the Reset button. It is important to note, that the FH 54 can, and should be zeroed, although it is not necessary to perform a zeroing before each measurement. But due to the zeroing being saved, you have to ensure, that the displayed value of the magnetic field is reasonable, e.g. if someone used the magnetometer and set the zero inside the magnet, your measured value will be of by this set zero. The Zeroing is performed with the Nullfeldkammer, that is provided with the FH 54. The exact procedure can be found in section 4.1 Inbetriebnahme of the manual. Communication with a computerThe FH 54 is connected to the computer with a serial (COM) port. There is currently no implementation of PyVISA in the library, so you don’t need a visa resource name but you have to know the name of the COM port that the FH 54 is connected to. In Windows this is usually along the lines of "COM1" and in Linux usually something like "dev/ tty1". You can use the provided MagnetPhysik.py (recommended) library or connect directly using the serial communication library and the commands that are found in chapter 7 of the manual. Communication using the MagnetPhysik.py Python libraryThe MagnetPhysik.py library can be imported as shown in the structure example below. Structure of a Python script for the FH 54 Magnetometer:
Download MagnetPhysik.py Every command the FH 54 can execute is implemented in the MagnetPhysik.py library and can be looked up in the library. The important ones are described here.
The code below will use the Magnet-Physik FH 54 Magnetometer to measure the magnetic field of the Bruker Magnet B-E 15, powered by the Heinzinger PTN 125-40 power supply.
|